4.6 Chin control
This control module is an alternative for the joystick control for Quadriplegic. Here user can control the direction and acceleration of the chair by the movement of his head. A touch pad will be mounted near the chin of the user. User touches the pad with his chin when required and navigates the wheelchair. When chin control is triggered Python program continuously senses any movement on the touch pad, touch pad can sense only skin hence any external stimuli other than the patient will not be sensed.
Fig.20 shows the interfaces of joystick, voice and touch pad that are connected to the raspberry Pi through the USB port.

Figure 22: Block Diagram of Input devices and USB of Raspberry Pi
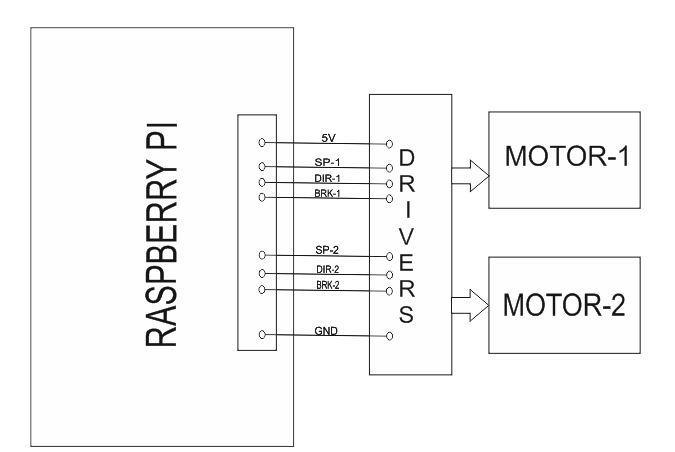
Figure 23: Block Diagram motor connections to the Raspberry Pi through drivers.
Fig.21 shows the GPIO pins of Raspberry Pi that are connected to drivers of the motors. Drivers are used to control the speed, direction and braking of the motor hence three GPIO pins are required for each motor.